

总结下Camera相关的基础知识
相关名词解释
1.Lens Shading 镜头暗影/暗角
镜头边沿的成像光线与镜头光轴有一个较大的夹角,沿着视场边缘光线的光圈减小,使得镜头边缘的光线是随着视角的变大成像亮度急剧地下降,呈现出画面角落的影像发暗。
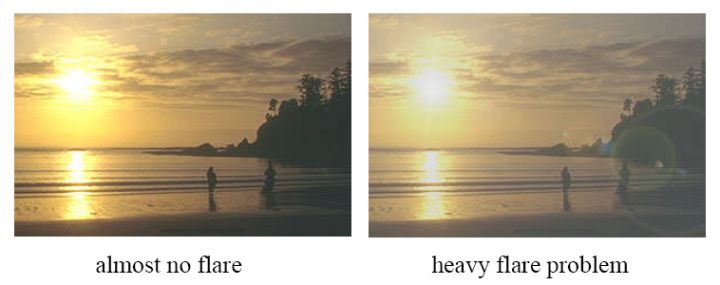
2.Flare 耀斑
镜片的表面反射或镜筒、反光镜组的内面所引起的反射光,到达底面后造成画面整体或一部份产生了雾蒙,降低了图像的鲜锐度。
3.FOV 视场角
在摄影学中,视角(angle of view)是在一般环境中,相机可以接收影像的角度范围,也可以常被称为视野。一般说的广角/超广角就是形容的FOV。
4.Aperture 光圈
光圈,光通过的有效孔径,它的大小决定着通过镜头进入感光元件的光线的多少,一般光圈越大,成像越亮。
5.Shutter 曝光
指曝光时间的长短,一般通过快门去控制。
6.Focal Length 焦距
照相机中,镜头就相当于凸透镜,从镜片光学中心到CMOS成像平面的距离大概就等于焦距。
7.Defect Pixel 坏点
一般是指在sensor 制造过程中因为单个像素的电路异常而不能正常表现感光亮度。
8.Flicker 闪烁/闪频
在中国交流电频率是50Hz,光强的波动就是100Hz,周期10ms。如果camera曝光时间不是10ms的整数倍,那么在不同的感光面接收到的光能量一定不一样,体现在图像上就是有明暗条纹。
9.Moire 摩尔纹
摩尔纹是数码照相机等设备上的感光元件出现的高频干扰,会使图片出现彩色的高频率条纹。
消除摩尔纹,应当使镜头分辨率远小于感光元件的空间频率或者感光器件像素密度能够大大提高、远远超过镜头分辨率。

10.Purple Fringe 紫边
目前产生的原因有好几张说法。比较广为接受的就是镜头色散与颜色插值运算之问题导致的。
这个问题的发生在于拍摄高反差的景物时,在明暗交界的边缘部分会出现异常的紫色。
11.ISO
传统摄影用来衡量底片感光度的单位,数值越高,感光度越强,但Noise也越明显,ISO数值每增加一倍, 感光度也增加一倍。
12.Sharpness 锐度
是指影像的銳利度,影像中的高頻成分越多,影像就越銳利,主要由鏡頭決定,鏡頭品質好,成像越銳利,鏡頭品質差,成像越模糊。
13.Contrast 对比度
对比度,代表影像中亮(白)和暗(黑)的差异,所谓的高对比就是白的地方够亮,黑的地方够黑。
14.Saturation 饱和度
Saturation為HSV其中一個维度。HSV Color Domain的三个维度分别为
– H: Hue , 色相 , 色彩在标准色环上的位置,以角度表示
– S: Saturation , 饱和度 , 色彩的纯度, 以%表示. 0%(灰色), 100%(完全饱和)
– V: Luminance, 明度 , 色彩的亮度, 以%表示.0%(黑色), 100%(白色)
15.DOF 景深
指在镜头前沿能够取得清晰图像的成像所测定的被摄物体前后距离范围。光圈、镜头焦距、及拍摄物的距离是影响景深的重要因素。
成像原理
一般来说,camera 主要是由 lens 和 sensor IC 两部分组成。细分的来讲,camera 设备由下边几部分构成:
1.lens(镜头),收集被照物体反射光并将其聚焦于Sensor芯片上;
2.sensor(图像传感器),Sensor 将从 lens 上传导过来的光线转换为电信号, 再通过内部的 AD 转换为数字信号;
3.ISP(图像信号处理),主要完成数字图像的处理工作,处理 sensor 采集到的原始数据;
4.CAMIF(camera 控制器) 芯片上的 camera 接口电路,对设备进行控制,接收 sensor 采集的数据交给 CPU,并送入屏幕进行显示。
图像编码格式
1.Bayer pattern:sensor获得彩色图像的方法是在 sensor表面覆盖含只含红、绿、蓝3色
的马赛克滤镜,对其输出信号通过一定的处理算法实现彩色,所以这种感光器件的排
列方式被称为bayer pattern。
因为只记录了单个的感光信息,通常也称为raw image。
2.RGB: 根据三基色原理,大部分光都可以用不同分量的R,G,B三色相加混合而成
其中r,g,b分别为三基色参与混合的系数,调整三者的值可以混合出黑色光和白色光之间的各种各项颜色的光。
3.YUV: 现代彩色影像系统中,采用彩色的sensor 进行摄像。将摄得的彩色影像信号进行插值分色,分别放大校正后得到RGB,再经过矩阵变换电路得到亮度信号Y和两个色差信号R-Y(即U),B-Y(即V)。这种色彩的表示方式就是YUV色彩空间。
图像处理
1.AWB 自动白平衡
物体在不同的光源照射下,呈现的颜色是不同的,这是有光源的色温决定的。其中,白色物体变化最为明显。在同一色温环境中如果对一幅自色图像进行白平衡校正后.那么对于其他非白色图像就都能真实的再现物体的颜色。
2.AF 自动对焦
成像点不一定落在焦平面上面,通过前后调整镜头,使成像点落在焦平面上面, 这就是对焦的过程,保证画面清晰。AF不是所有camera模组都支持,得看有没有带AF的模组,定焦的模组就不带。
3.AE 自动曝光
由于环境的亮度是动态变化的,所以为了保证画面不会过亮/过暗,要及时调整曝光時間和ISO。自动曝光是相机根据光线的强弱自动调整曝光量,防止曝光过度或者曝光不足,它直接关系到画面的亮度和图像质量,是成像的基础。
4.Noise Reduction 去噪
5.Edge Enhancement 边缘加强
强化影像的Edge和Texture,让影像看起来更加锐利
加强Edge,可能因为过强导致物体轮廓出现白边。
加强Texture,会同步加强噪点的程度。
6.Color Reproduction 色彩还原
ISP会利用信号处理技术,来还原甚至加强原始影像的色彩.
• 色域转换 : 为了方便色彩的处理, 将颜色由RGB转换到YCbCr或是H.S.V
• 色调转换 : 改变色彩的属性, ex. 红 -> 橙 -> 黄
• 饱和度转换 : 让色彩变的更鲜艳或是较不鲜艳



